Published on
May 28, 2026
Accelerate industrial operator training and lower the VR learning curve by creating autonomous, step-by-step onboarding systems for high-fidelity control environments.
Divij Jindal is an independent freelance Unity and XR developer specializing in building immersive prototypes, simulators, virtual walkthroughs, and high-fidelity training experiences. His work helps heavy industries mitigate operational risk, cut training costs, and drastically reduce the time required to master complex machinery.
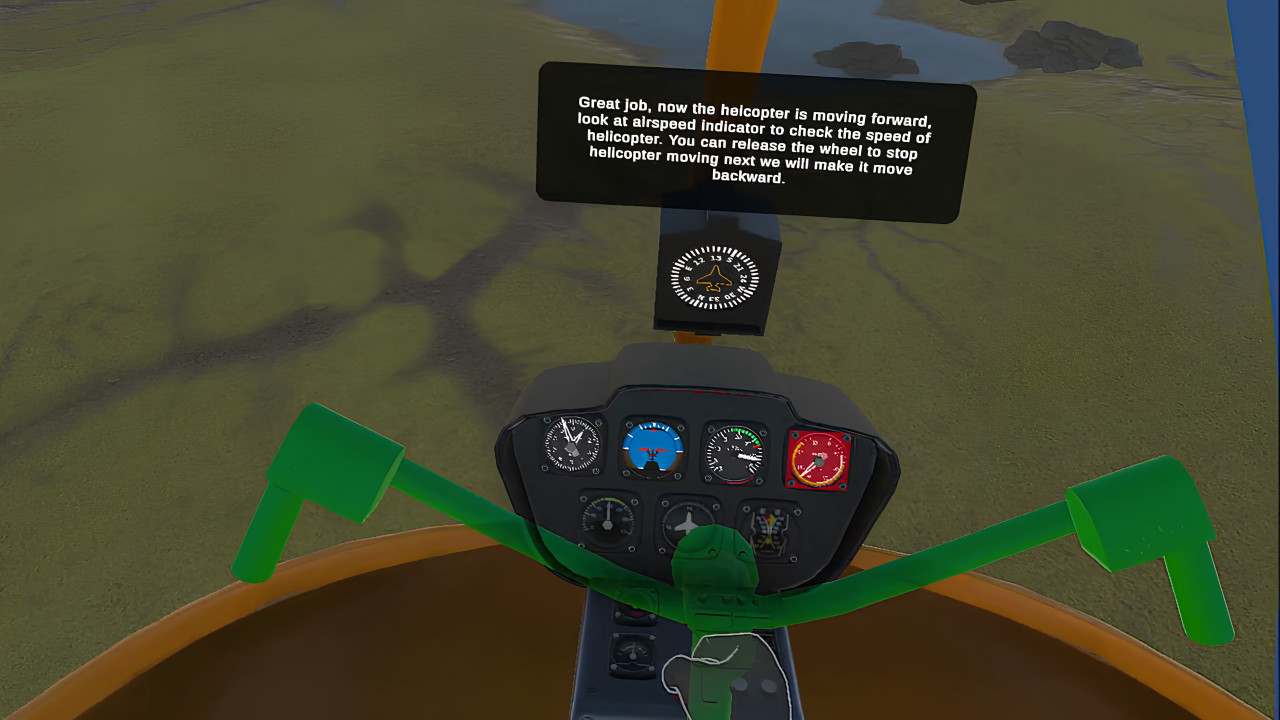
For one of his projects, he developed a highly immersive vehicle simulation prototype within Unity. His goal was to explore how virtual reality can safely introduce trainees to intricate mechanics and heavy equipment controls. With helicopter cockpit being the primary use case, the simulator needed to feature fully interactive controls (i.e. the collective, cyclic, throttle, and yaw pedals) to be perfectly synchronized with working instruments (i.e. altimeter, compass, RPM meter, attitude indicator, and airspeed meter).
While high-fidelity VR simulators offer a safe environment to learn, implementing complex operational workflows introduces a distinct hurdle: a steep dual learning curve. Trainees must simultaneously grasp real-world technical operations and complex virtual reality mechanics, such as hand-tracking interactions, custom spatial grabbing, and spatial navigation. Without constant, costly supervision from a dedicated instructor, users frequently become overwhelmed or confused by the sheer volume of interactive dials, levers, and instruments. To make any complex industrial simulation truly effective, repeatable, and scalable, it requires an intelligent, autonomous onboarding system that can guide users through the control layout step-by-step without human intervention.
To bridge this gap, Divij designed and engineered an intelligent, autonomous onboarding framework integrated directly into the virtual environment. Rather than confronting the user with a fully active, overwhelming cockpit, his solution deconstructs complex machine operations into a structured, self-paced learning journey.
Divij’s solution relies on four core pillars to guide trainees seamlessly through complex controls:
The guided onboarding system effectively eliminated user confusion surrounding hand interactions and complex instrument layouts. By introducing mechanics sequentially rather than all at once, the prototype demonstrated how immersive training can drastically lower fuel costs, reduce equipment dependency, and eliminate real-world operational risks. The final proof of concept showcases a highly scalable workflow that enables trainees to master intricate industrial procedures faster and with significantly higher confidence.
.jpg)
Divij successfully transformed a highly complex control environment into an intuitive, self-paced learning application. By integrating VR Builder, he not only saved valuable time during development; In addition to a working final app, he now also has the building blocks to quickly adapt it for new or changing requirements. Instead of a throw-away prototype, he now has created the scalable foundation for his project business.
"What I really appreciate about VR Builder is how clearly the workflow is organized. It allowed me to break down a highly technical onboarding process into clear chapters and tasks with zero custom code required. By managing the logic visually before, during, and after a task, I built a sophisticated training flow that is both flexible and production-oriented. It significantly accelerated my development timeline."
— Divij Jindal, Freelance Unity & XR Developer
From MindPort's perspective, Divij’s simulator is a stellar example of how VR Builder empowers individual creators to rapidly build enterprise-grade logic for complex machinery. It highlights the framework's versatility, proving that VR Builder isn't just for simple procedural training, but is fully capable of handling sophisticated physics, precise hardware variables, and multi-layered user interfaces in high-fidelity simulator environments.